БУДОВА ТА ПРИНЦИП РОБОТИ
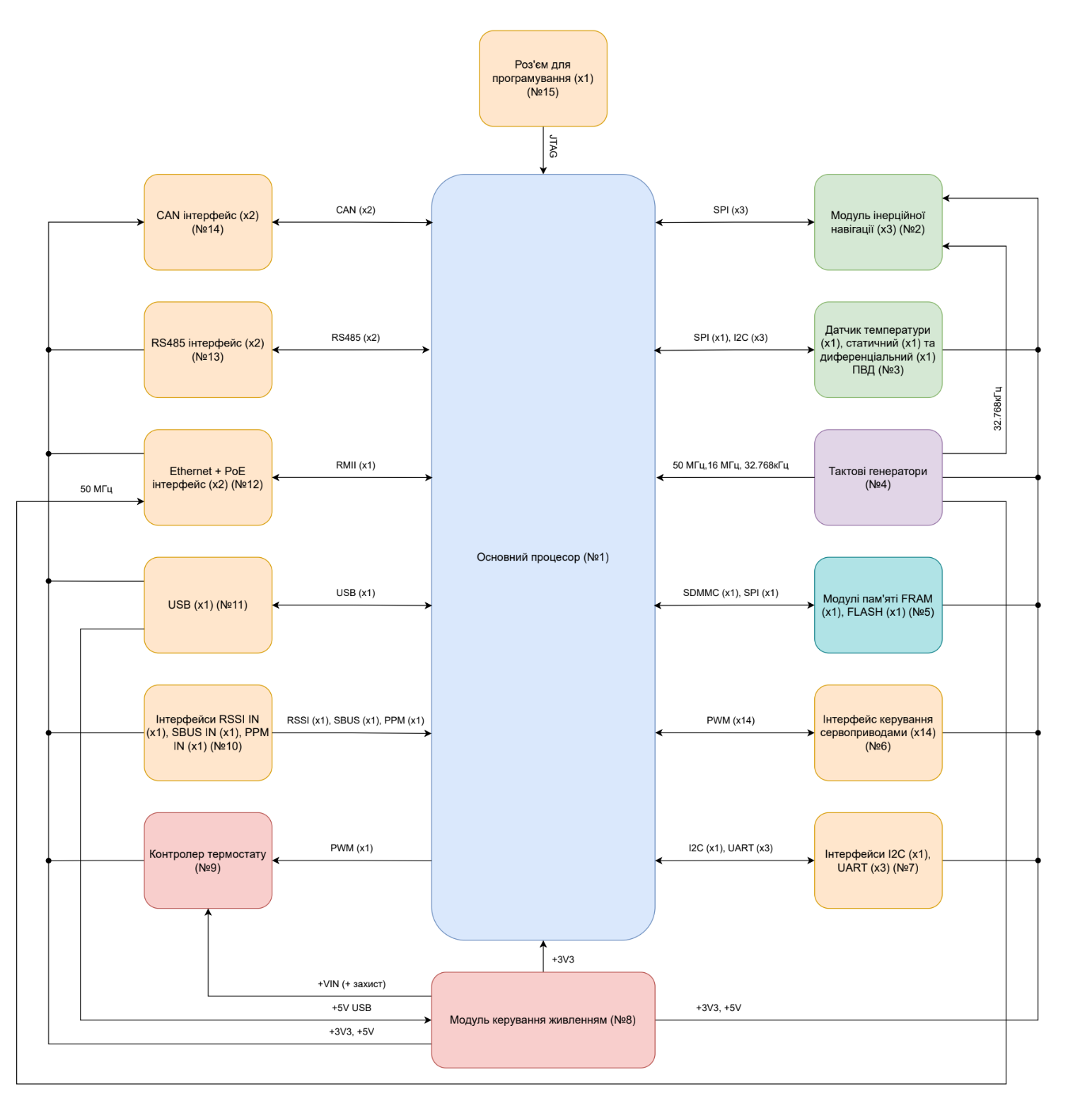
Рис 1. Блок-схема контролеру
УНІВЕРСАЛЬНИЙ ПОЛЬОТНИЙ КОНТРОЛЕР
ТЕХНІЧНИЙ ПАСПОРТ
Реєстраційний №: N/A
Дійсний з «___»________2025 р.
Заводський №: SFC-25F02B-CHN-00875
Модель: SFC-1
При передачі виробу іншому власнику даний документ має передаватись разом з виробом
2025
ЗМІСТ
Ревізія |
Дата |
Опис змін |
rev. A |
01.01.2024 |
Початкова версія |
rev. B |
01.01.2025 |
Виправлення друкарських помилок у розділі X |
Універсальний польотний контролер (далі – контролер) призначений для управління повітряними, наземними та надводними безпілотними апаратами.
Забезпечує надійне керування та навігацію в складних умовах експлуатації.
Контролер постачається в комплектації, зазначеній у таблиці 1:
Таблиця 1 – Комплект постачання
№ |
Найменування |
Кількість |
1 |
Польотний контролер |
1 |
2 |
Конектори з дротами під пайку |
12 |
3 |
Упаковка (коробка) |
1 |
4 |
Корпус |
1* |
* – Корпус входить до розширеної комплектації і не постачається при купівлі базового комплекту польотного контролера.
Основні комплектуючі польотного контролера наведено в таблиці 2:
Таблиця 2 – Основні комплектуючі польотного контролера
№ |
Тип |
Модель |
Примітка |
1 |
Процесор |
STM32H743 |
|
2 |
Гіростабілізатор №1 |
ADIS16470 |
|
3 |
Гіростабілізатор №2 |
ICM45686 |
|
4 |
Гіростабілізатор №3 |
BMI088 |
|
5 |
Магнітометр |
MMC5983MA |
|
6 |
Статичний приймач тиску повітря |
MS5611 |
|
7 |
Диференційний приймач тиску повітря |
5525DSO-B001DS |
|
8 |
Датчик температури №1 |
TMP117 |
|
9 |
Датчик температури №2 |
TMP390 |
Автономний |
10 |
Пам’ять (FRAM) |
MB85RS256 |
|
12 |
Зовнішній сторожовий таймер / монітор напруги живлення |
CAT823 |
Автономний |
Основні інтерфейси польотного контролера наведено в таблиці 3:
Таблиця 3 – Основні інтерфейси польотного контролера
№ |
Тип |
Параметри |
Примітка |
1 |
1x Ethernet |
10/100 Мбіт/с |
З підтримкою Passive PoE (8–50 В) |
2 |
2x CAN FD |
1 Мбіт/с, 5 В |
Гальванічна розв’язка (5000 В) |
3 |
2x RS-485 |
16 Мбіт/с, 5 |
Гальванічна розв’язка (3500 В) |
4 |
1x SBUS/PPM/DSM |
0…3.3В |
Захист ESD + буфер |
5 |
1x RSSI |
0…3.3В |
Захист ESD |
6 |
14x PWM |
0…3.3В |
Захист ESD + буфер |
7 |
1x I2C |
400кГц, 0…3.3В |
Захист ESD + ре-драйвер |
8 |
1x USB Type-C |
USB FS |
Для налаштування, перепрошивки, живлення |
9 |
1x ARM JTAG |
— |
Стандартний повнорозмірний ARM JTAG |
10 |
1x Micro SD |
— |
Захист ESD + можливість відключення живлення |
Таблиця інтерфейсів підключення польотного контролеру наведена в таблицях 4-13:
Таблиця 4 – Підключення Ethernet/PoE
Ethertnet/PoE |
|||
№ |
Назва |
Тип |
Примітка |
1 |
RX+ |
Вхід |
|
2 |
RX- |
Вхід |
|
3 |
TX+ |
Вихід |
|
4 |
TX- |
Вихід |
|
5 |
VIN+ |
Живлення |
8–50В |
6 |
VIN+ |
Живлення |
8–50В |
7 |
GND |
Живлення |
|
8 |
GND |
Живлення |
|
Таблиця 5 – Підключення SBUS/PPM/DSM/RSSI
SBUS/PPM/DSM (RC IN/ RSSI PWM) |
|||
№ |
Назва |
Тип |
Примітка |
1 |
+5V OUT |
Живлення |
|
2 |
RSSI IN |
Вхід |
|
3 |
SBUS/DSMX |
Вхід |
|
4 |
PPM IN |
Вхід |
|
5 |
GND |
Живлення |
|
Таблиця 6 – Підключення I2C інтерфейсу
I2C |
|||
№ |
Назва |
Тип |
Примітка |
1 |
+5V OUT |
Живлення |
|
2 |
I2C1 SCL |
Вхід/Вихід |
|
3 |
I2C1 SDA |
Вхід/Вихід |
|
4 |
GND |
Вхід |
|
Таблиця 7 – Підключення CAN (№1 та №2)
CAN №1, CAN №2 |
|||
№ |
Назва |
Тип |
Примітка |
1 |
VIN |
Живлення |
Опційно зовнішнє живлення (8–50 В) |
2 |
CAN1 H |
Вхід/Вихід |
|
3 |
CAN1 L |
Вхід/Вихід |
|
4 |
GND |
Вхід |
|
Таблиця 8 – Підключення RS-485 Інтерфейсу (№1 та №2)
RS-485 №1, RS-485 №2 (гальванічно розв'язані) |
|||
№ |
Назва |
Тип |
Примітка |
1 |
VIN |
Живлення |
Опційно зовнішнє живлення (8–50 В) |
2 |
RS-485 B |
Вхід/Вихід |
|
3 |
RS-485 A |
Вхід/Вихід |
|
4 |
GND |
Вхід |
|
Таблиця 9 – Підключення USART Інтерфейсу (№1, №2, №3)
SBUS/PPM/DSM (RC IN/ RSSI PWM) |
|||
№ |
Назва |
Тип |
Примітка |
1 |
+5V OUT |
Живлення |
|
2 |
USART TX |
Вхід/Вихід |
|
3 |
USART RX |
Вхід/Вихід |
|
4 |
USART CTS |
Вхід/Вихід |
|
5 |
USART RTS |
Вхід/Вихід |
|
6 |
GND |
Живлення |
|
Таблиця 10 – Підключення основного джерела живлення
PWR IN |
|||
№ |
Назва |
Тип |
Примітка |
1 |
VIN |
Живлення |
Зовнішнє живлення (8–50 В) |
2 |
VIN |
Живлення |
Зовнішнє живлення (8–50 В) |
3 |
GND |
Живлення |
|
4 |
GND |
Живлення |
|
Таблиця 11 – Підключення PWM/GPIO Інтерфейсу
PWM/GPIO |
|||
№ |
Назва |
Тип |
Примітка |
1 |
PWM1 |
Вхід/Вихід |
|
2 |
PWM2 |
Вхід/Вихід |
|
3 |
PWM3 |
Вхід/Вихід |
|
4 |
PWM4 |
Вхід/Вихід |
|
5 |
PWM5 |
Вхід/Вихід |
|
6 |
PWM6 |
Вхід/Вихід |
|
7 |
PWM7 |
Вхід/Вихід |
|
8 |
PWM8 |
Вхід/Вихід |
|
9 |
PWM9 |
Вхід/Вихід |
|
10 |
PWM10 |
Вхід/Вихід |
|
11 |
PWM11 |
Вхід/Вихід |
|
12 |
PWM12 |
Вхід/Вихід |
|
13 |
PWM13 |
Вхід/Вихід |
|
14 |
PWM14 |
Вхід/Вихід |
|
15 |
GND |
Живлення |
|
Таблиця 12 – Підключення ARM JTAG Інтерфейсу
ARM JTAG (20 pin) |
|||
№ |
Назва |
Тип |
Примітка |
1 |
VTref |
Живлення |
|
2 |
NC |
— |
Не використовується |
3 |
nTRST |
Вхід/Вихід |
|
4 |
GND |
Живлення |
|
5 |
TDI |
Вхід/Вихід |
|
6 |
GND |
Живлення |
|
7 |
TMS |
Вхід/Вихід |
|
8 |
GND |
Живлення |
|
9 |
TCK |
Вхід/Вихід |
|
10 |
GND |
Живлення |
|
11 |
RTCK |
Вхід/Вихід |
|
12 |
GND |
Живлення |
|
13 |
TDO |
Вхід/Вихід |
|
14 |
GND |
Живлення |
|
15 |
nRESET |
Вхід/Вихід |
|
16 |
GND |
Живлення |
|
17 |
DBGRQ |
Вхід/Вихід |
|
18 |
GND |
Живлення |
|
19 |
+5V IN |
Живлення |
|
20 |
GND |
Живлення |
|
Основні характеристики контролера управління наведені у таблиці 13:
Таблиця 13 - Технічні характеристики контролера управління
№ |
Характеристика |
Од. вим. |
Умови вимірювання |
Значення |
1 |
Напруга живлення (включно з входом PoE) |
В |
8–50 |
|
2 |
Струм споживання |
А |
V = 12 В |
0.1±0.05 |
3 |
Споживана потужність |
Вт |
1.5 |
|
4 |
Дрейф нуля гіроскопа |
°/год |
T = 25 °С |
8.0 |
5 |
Випадковий кутовий дрейф гіроскопа |
°/√год |
0.3 |
|
6 |
Смуга пропускання гіроскопа |
Гц |
550.0 |
|
7 |
Нестабільність зсуву акселерометра |
μg |
13.0 |
|
8 |
Діапазон вимірювання акселерометра |
g |
±40 |
|
9 |
Відносна похибка диференціального ПВД |
% |
±0.25 |
|
10 |
Абсолютна похибка статичного ПВД |
мБар |
±2.5 |
|
11 |
Абсолютна роздільна здатність статичного ПВД |
мБар (м) |
0.012 (~0.1) |
|
12 |
Абсолютна похибка вимірювання температури |
°С |
±0.1 |
|
13 |
Захист від вологи |
IP |
Не нижче IP64* |
|
14 |
Робочий температурний діапазон |
°С |
-55…+85 |
|
15 |
Габарити плати |
мм |
170*85 |
|
16 |
Вага плати |
гр |
84 |
|
17 |
Середній повний ресурс |
год |
TBD |
Рис 1. Блок-схема контролеру
Контролер (рис. 1) складається з наступних модулів:
Контролер повинен експлуатуватися відповідно до вимог і умов, зазначених у цьому паспорті. Перевищення експлуатаційних параметрів не допускається.
Контролер повинен зберігатися в індивідуальній упаковці та антистатичному пакеті в сухому, опалюваному, чистому приміщенні при температурі від +5 до +40 °С і відносній вологості не більше 80%.
Основні контрольовані параметри вказані у таблиці 14:
Таблиця 14 – Контрольовані параметри
№ |
Характеристика |
Од. вим. |
Умови вимірювання |
Допустимий діапазон |
Результат контролю |
1 |
Напруга живлення, V |
В |
8В, 12В, 50В |
8..50 |
+ |
2 |
Струм споживання в режимі очікування, I |
А |
V = 12 В |
0.05-0.2 |
+ |
3 |
Абсолютний струм споживання нагрівача |
TBD |
|||
4 |
Відносне значення втрати даних при передачі/прийому через порт USART |
% |
Розмір тестового пакету даних- 512 біт, швидкість передачі - 115200 бод, 3 повторення |
Не допускається |
+ |
5 |
Відносне значення втрати даних при передачі/прийому через порт RS-485 |
+ |
|||
6 |
Відносне значення втрати даних при передачі/прийому через порт CAN |
+ |
|||
7 |
Відносне значення втрати даних при передачі/прийому через портPPM |
+ |
|||
8 |
Відносне значення втрати даних при передачі/прийому через порт SBUS |
+ |
Таблиця 14 – Продовження
9 |
Відносне значення втрати даних під час прийому через порт I2C |
% |
Розмір тестового пакету даних - 512 біт, швидкість передачі - 115200 бод, 3 повторення. |
Не допускається |
+ |
10 |
Допустима відносна похибка вимірювання рівня RSSI |
< 3 |
+ |
||
11 |
Абсолютна затримка (ping) через Ethernet |
мс |
< 50 |
+ |
|
12 |
Відносна втрата пакетів через Ethernet |
% |
Прийом 100 пакетів даних довжиною 64 біт локальної тестової мережі. |
< 1 |
+ |
13 |
Допустима відносна похибка встановлення частоти керування сервоприводом, f |
V = 12 В, f = 50 Гц |
< 10 |
+ |
|
14 |
Допустима відносна похибка коефіцієнта заповнення сигналу, T |
V = 12 В, T = 1..2 мс. |
< 1 |
+ |
|
15 |
Кількість несправних датчиків |
шт |
Усі допустимі умови |
Не допускається |
+ |
За результатами контролю якості польотний контролер визнаний придатним до експлуатації.